Информационное наполнение облака точек при воздушном лазерном сканировании
Лазеры в сельском хозяйстве, Научная библиотека 28.11.2019 Комментарии к записи Информационное наполнение облака точек при воздушном лазерном сканировании отключеныА. Ульрих // журнал Геоматика, 2015
Информационное наполнение облака точек при воздушном лазерном сканировании
Каждая технология в дистанционном зондировании, направленная на получение 3D-информации в виде облаков точек (как промежуточного информационного продукта) — неважно, основана она на технологиях лазерного сканирования или фотограмметрии — всего лишь делает отдельные измерения поверхности объекта, с ограниченным пространственным разрешением и ограниченной точностью. Информационное наполнение облака точек в значительной степени зависит от пространственного распределения этих измерений в 3D-пространстве.
На сегодняшний день на рынке представлено большое число воздушных лазерных сканеров с мало осмысляемыми или вводящими в заблуждениями характеристиками. В ряде случаев необходим экспертный уровень знаний для того, чтобы хотя бы приблизительно оценить достижимую на практике производительность и оценить, как сказываются указанные в спецификации инструмента особенности на фактических данных.
Мы рассмотрим некоторые из характеристик, обычно указываемых в спецификациях: частота сканирования, эффективная скорость сканирования, особенности измерения дальности, типы сканера и скорость сканирования. Также будут рассмотрены возможные варианты распределения точек отражений лазера на земной поверхности при типичных сценариях выполнения работ наиболее совершенными лазерными сканерами и эффекты взаимодействия при работе с многоканальными инструментами .
В данной статье также предлагается альтернативный критерий количественной оценки распределения точек лазерных отражений (ТЛО) на земной поверхности и, более приближенный к действительности, чем стандартный критерий плотности (количество точек на 1 кв. м). Также вводится значение добротности для оценки качества съемки земной поверхности, что позволяет производить непосредственное сравнение воздушных лазерных сканеров, созданных с использованием технологий лазерного сканирования.
ВВЕДЕНИЕ
Облака точек — стандартный промежуточный информационный продукт, получаемый при использовании различных технологий дистанционного зондирования (лидары, радары, цифровая фотосъемка) и используемый для получения трехмерной информации. В целом, все технологии дистанционного зондирования основаны на получении отдельных измерений поверхности объекта (редко — объема) с ограниченным разрешением и точностью. Конкретное содержание и информационная

ценность облака точек очень сильно зависят от пространственного распределения данных в облаке точек. На рис. 1 показано последовательное проведение измерений воздушным лазерным сканером последнего поколения, использующим граненое зеркало для отражения лазерного луча. Поверхность сканируется с помощью отражений лазерных импульсов, испускаемых с частотой несколько сот тысяч раз в секунду. Последовательное проведение отдельных измерений формирует линии (строки) сканирования, как показано на рис. 1, практически перпендикулярные оси полета. В данном примере сканирование ведется слева направо относительно направления полета, и так — для каждой строки сканирования. Очевидно, что для достижения равномерного распределения ТЛО в пределах сканируемой территории необходимо, чтобы дистанция между отдельными ТЛО внутри строки была равной дистанции между строками сканирования.
Измерение третьей координаты — высоты, выполняется посредством записи формы отраженного лазерного сигнала от объекта на территории сканирования (например, кроны дерева или поверхности грунта — как показано на рис. 1). Для наглядности мы расположили график изменения амплитуды отраженного сигнала от времени вдоль оси прохождения лазерного луча. Интервал записи, или «ширина импульсов» (т.е. длительность по времени отдельных «сэмплов» при оцифровке аналогового сигнала) определяет фактическое разрешение по дальности и по высоте. Обратите внимание, что некоторые ТЛО на рис. 1 выделены черным цветом: эти 9 точек попадают в пределы одной единицы площади — 1 кв. м (иллюстрация плотности сканирования в точках на 1 кв. м). Некоторые точки на рис. 1 соединены ребрами, длина которых равна средней дистанции между точками; их обратная величина — пространственная частота измерений. Кроме того, обратите внимание на несколько точек, показанных вдоль оси сканирующего луча — это отражения от объектов, рассчитанные после оцифровки и анализа полной формы отраженного сигнала. Их количество не ограничено, кроме того, для каждого отражения могут быть рассчитаны различные дополнительные атрибутивные характеристики.
Требования, предъявляемые к воздушному лазерному сканированию обычно включают достижение определенной плотности ТЛО на 1 кв. м поверхности. Однако требование соблюдения абсолютного количества ТЛО на 1 кв. м никак не учитывает особенности пространственного распределения точек на сканируемой территории. При этом истинное качество данных определяет именно равномерность пространственного распределения. Можно сказать, что плотность сканирования является лишь функцией пространственного распределения ТЛО в двух направлениях. При одинаковой плотности (в точках на 1 кв. м) полностью равномерное распределение позволяет достичь максимальной ценности полученной информации, в то время как неравномерное распределение ТЛО снижает информационную наполненность данных, что будет наглядно продемонстрировано позднее.
В настоящее время производители лазерных сканеров предлагают большое количество лазерных сканирующих систем воздушного базирования (АЛС — авиационный лазерный сканер), снабженных спецификациями и описаниями, довольно сложными для понимания и сопоставления с требованиями реальных задач. Назначение систем АЛС — топографическое картографирование земной поверхности с максимальной эффективностью, то есть получение максимального количества измерений координат. В большинстве случаев технические характеристики сканеров пестрят значениями частоты сканирования (импульсов в секунду) и максимальных высот полета, однако эти характеристики сами по себе ничего не говорят ни о реальной производительности, ни о качестве данных, получаемых этими инструментами.
Добавим также, что эффективность и продуктивность АЛС часто оценивается по максимальной частоте сканирования (число лазерных импульсов в секунду). Несмотря на то, что эти сведения являются полезными, они не обеспечивают ни точной, ни хотя бы отдаленной картины реальной производительности и эффективности, с которой в действительности может быть произведена съемка некоторой территории за конкретный период времени и с обеспечением конкретного качества измерений. Такие понятия, как скорость покрытия данными (coverage speed) и качество данных (data quality) ранее не вводились и не использовались при оценке сканирующих систем. В данной статье мы попытаемся ответить на следующие вопросы:
- Как быстро можно вести сканирование с помощью АЛС, обеспечивая определенный интервал (дистанцию) между ТЛО на земной поверхности?
- Как изменение высоты рельефа влияет на скорость сбора данных АЛС?
- Может ли система АЛС с меньшей максимальной частотой сканирования превзойти другую систему АЛС с большей максимальной частотой сканирования при оценке по критерию «минимальное общее время съемки территории»?
ТОЧКИ ЛАЗЕРНЫХ ОТРАЖЕНИЙ: ИНТЕРВАЛ И ПЛОТНОСТЬ
Данные лазерного сканирования, за исключением данных, полученных по технологии Flash LIDAR, получают посредством дискретных последовательных измерений; для одноканального лазерного сканера — по одному измерению, для двухканального лазерного сканера — по два измерения. Обычно отдельные измерения формируют строки сканирования. Итоговый набор данных состоит из большого числа строк сканирования. Расстояние на земной поверхности, разделяющее отдельные точки, принадлежащие одной строке, назовем А. Строки сканирования, в свою очередь, разделяются дистанцией В. Дистанция между строками (или межстрочный интервал) у систем с качающимся зеркалом существенно меняется в зависимости от ширины охвата (особенно на краях полосы сканирования). В то же время, для систем с вращающимся зеркалом она практически неизменна.
Обычно при планировании съемочного залета принято отталкиваться от интервала между точками или от плотности точек, обычно измеряемой в точках на 1 кв. м. Так, “LIDAR Guidelines and Base Specification” (USGS, 2010) — «Инструкция по выполнению воздушного лазерного сканирования», Геологическая служба США, 2010 — использует термин «номинальная дистанция между точками», не давая при этом точного определения данного термина. Предварительная версия стандарта ASPRS «LIDAR density and spacing specification» («Спецификация по плотности и интервалам в данных лазерного сканирования» (2009) использует два определения: point spacing, или интервал между ТЛО, и point density — плотность точек. Оба термина вводятся как статистический критерий контроля качества облаков ТЛО, полученных в ходе воздушного лазерного сканирования в результате пост-обработки.
Определения интервала между точками основано на триангуляции Делоне по ТЛО. В этом случае интервал между точками можно определить как среднюю длину линий, соединяющих данную точку с соседними точками. Тем не менее, для последующих рассуждений, будем использовать не среднюю, а максимальную длину ребра (наихудший интервал для данной точки). Это будет гарантировать нам реалистичную оценку пропусков в данных, устраняя фиктивное «улучшение ситуации» за счет статистического влияния чрезмерно близко расположенных точек (такая ситуация возникает, к примеру, при чрезмерно редком расположении строк сканирования (рис. 2).

Для достижения некоторого «равновесия» между терминами «плотность» и «интервал», введем понятие «обратного номинального интервала», или 1/INS, где INS — интервал. На основании этого можно ввести два производных термина:
- Номинальная частота измерений (НЧИ) — измеряется в точках на метр, является обратной величиной от номинального интервала. Так, если номинальная частота равна 2 точки на метр, то номинальный интервал (максимальный интервал) равен 0,5 м.
- Номинальная плотность измерений (НПИ) — измеряется в точках на квадратный метр, то есть число точек в пределах некоторой территории, деленное на площадь данной территории.
Как будет продемонстрировано далее, номинальная частота измерений, или НЧИ, определяет возможность и качество обнаружения объектов, описания поверхностей, точность моделирования и т.п.
УСТРОЙСТВО ЛАЗЕРНОГО СКАНЕРА
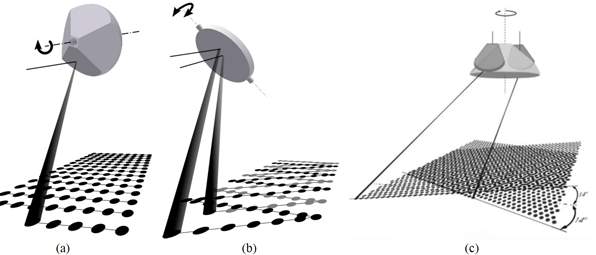
Сегодня большинство лазерных сканирующих систем создаются с использованием всего двух типов механизмов отклонения луча: вращающегося граненого зеркала или качающегося зеркала. Очевидным преимуществом граненого зеркала является то, что его вращение происходит в одном направлении, постоянно и равномерно, что позволяет получать прямые параллельные строки сканирования на земной поверхности. (см. рис. 3а). Достижимая скорость сканирования строк при этом весьма высока, что позволяет добиваться равномерного распределения точек в широком диапазоне высот и скоростей. Кроме того, низкие вибрации и слабые механические воздействия на отражающие поверхности позволяют добиваться более высокой точности измерений. Отрицательной стороной является то, что часть импульсов лазера не покидает пределов инструмента, теряясь при определенной ориентации каждой грани.

Последняя особенность сильно отличает сканеры с граненым зеркалом от сканеров с качающимся зеркалом, где регистрируются все импульсы лазера. Учитывая, что съемка ведется с движущейся платформы, итоговое распределение точек на земной поверхности представляет собой «пилу» или синусоиду — в зависимости от используемой электронной схемы управления зеркалом. Обычно концентрация точек резко возрастает в районе крайних положений зеркала (на концах зубьев «пилы» — см. рис. 3б), что может быть лишь частично устранено с применением даже самых изощренных механических и электронных решений.
Существует также целый класс инструментов, использующих один механизм отклонения луча, но при этом использующих два (и более) луча для измерений дальности, которые испускаются по немного отличающимися углами (рис. 3б). Альтернативой этому является использование граненых зеркал с парами граней, осуществляющих отражение под достаточно различными углами (рис. 3в). При этом в любой двухканальной системе каждый луч имеет свою схему распределения отражений на земной поверхности. В зависимости от типа механизма, могут возникать желательные или нежелательные варианты взаимного наложения схем распределения ТЛО на земной поверхности, особенно на местности с выраженным рельефом.
В следующей части рассматриваются схемы расположения ТЛО при сканировании с использованием лазерных сканеров с различными типами механизма отклонения луча.
ПРОИЗВОДИТЕЛЬНОСТЬ ИНСТРУМЕНТОВ
Сравнение параметров для трех типов лазерных сканеров приведены в табл. 1.
Не все параметры системы могут быть описаны независимо друг от друга. Есть два набора параметров, значения которых сильно зависят друг от друга. Примеры таких пар: угол обзора и количество строк сканирования в секунду; максимальная высота полета, максимальная частота сканирования и допустимое количество импульсов, одновременно находящихся в воздухе.
Рассмотрим первый набор таких параметров, как количество строк сканирования в секунду и угол обзора.
Производительность сканера
У всех сканеров с качающимся зеркалом есть большая взаимосвязь между количеством строк сканирования (в секунду) и углом обзора. Далее мы будем рассматривать все лазерные сканеры исходя из того, что под строкой сканирования понимается движения луча от одной стороны полосы охвата до другой, что все примеры рассматриваются для одного канала, а взаимодействие лучей будет рассмотрено позднее.
На рис. 4 наглядно показана зависимость максимального количества строк сканирования и максимальной угловой скорости смещения лазерного луча от ширины охвата (в градусах). Сведения почерпнуты из открытых источников. Нетрудно видеть, что у инструмента А обе вышеупомянутые характеристики совершенно не зависят от угла обзора. Аналогичные параметры для инструментов В и С наоборот, очень сильно зависят от угла обзора.

Пусть частота сканирования равна PRR. Число строк сканирования в секунду (обозначим как LPS) напрямую связано с промежутками между строками сканирования (и ТЛО в этих строках) на земной поверхности (величина b, см. выше), а угловая скорость — с промежутками между точками в пределах одной строки, как это показано на рис. 5. При скорости полета носителя АЛС равной V метров в секунду верно:
Расстояние между строками сканирования: B = V / LPS;
Угловая скорость сканирования = da / dt / PRR;
Расстояние между точками в строке: А = R * da/dt/PRR.

Предположим, что мы используем инструмент С, и хотим добиться работы на максимальной (250 кГц) частоте сканирования. Дивергенция луча для него составляет 0,35 миллирадиан. Тогда для того, чтобы избежать взаимного пересечения зон освещения лазерными импульсами («следов» лазера) в пределах строки сканирования, для инструмента С, потребуется угловая скорость отклонения лазерного луча в 5 угловых градусов за 1 миллисекунду. Однако (см. рис. 4) максимум, на что он способен — 3 градуса за 1 миллисекунду. Следовательно, этот инструмент на максимальной частоте сканирования не может обеспечить регистрацию ТЛО, лазерные «следы» которых не перекрываются.
Большое количество строк сканирования в секунду при малом угле обзора может быть востребовано при выполнении некоторых специфических задач. К сожалению, узкие углы обзора не приводят к увеличению угловой скорости сканирования, поскольку на краю строки сканирования качающееся зеркало должно остановиться, а потом двинуться назад с возрастающей скоростью. В тех местах, где зеркало меняет направление своего движения, степень наложения точек друг на друга исключительно велика.
Для достижения равномерного распределения ТЛО в строке и между строк, обычно подбирают наиболее оптимальное сочетание параметров съемки (высота полета, скорость, частота сканирования точек и строк). Схемы сканирования показаны (для каждого из инструментов) на рис. 6. Рядом прилагается уравнение, используя которое можно определить оптимальное количество строк сканирования для каждого типа инструментов. Наибольшая равномерность для инструментов А и С достигается при равенстве расстояния между строками в середине строки (переменная В) и между точками в строке на краю строки (переменная А). Для инструментов типа В значение переменной А берется для середины строки. В данном рассуждении мы также исходим из того, что взаимодействие между отдельными каналами многоканальных лазеров идеально и позволяет оптимально заполнять пропуски в данных друг у друга (для инструментов В и С). Обратим также внимание, что при использовании только одного канала в инструментах В и С максимальная дистанция между точками на краях полосы охвата будет равняться 2б. Кроме того, у систем с качающимся зеркалом из-за низкой частоты строк на больших углах охвата оптимальное число строк сканирования в секунду (которое получается из уравнений, представленных на рис. 6) может быть технически недостижимо.

Инструменты В и С производят одновременные измерения в немного разных направлениях. Поскольку импульсы от обоих каналов отражаются одним и тем же зеркалом, необходимо разделить их по направлениям, в которых они излучаются. Каждый канал создает свой рисунок строки ТЛО на земной поверхности.
Упрощенно можно говорить о том, что каждый канал, отклоняя луч, описывает на земле «волну» с некоторым периодом; при этом на оптимальность распределения ТЛО влияет фазовый сдвиг колебаний этих волн (рис. 7). В идеале сдвиг фаз должен составлять половину периода колебания зеркала. На практике реальный фазовый сдвиг между двумя каналами зависит от большого количества причин — скорости, высоты над землей и частоты строк сканирования. Для плоской поверхности оптимальный подбор параметров, влияющих на сдвиг фаз, возможен. В горных участках или даже просто в случае расчлененного слабохолмистого рельефа условие оптимально фазового сдвига не может быть выполнено — при смене высоты полета будут происходить постоянные непрогнозируемые изменения от относительно оптимального до весьма неоптимального фазового сдвига.

Диаграмма производительности
Диаграмма производительности позволяет рассчитать максимальную частоту сканирования для заданной высоты, свойств сканируемой поверхности и атмосферных условий. Диаграмма производительности, представленная на рис. 8 соответствует углу сканирования 40 градусов, 90% вероятности детектирования отражения, 10% альбедо (коэффициент отражения) поверхностей сканируемых объектов, и видимости 23 км. Производительность напрямую зависит от конкретного лазера; для двухканальных лазеров все выкладки относятся к одному каналу.

Например, инструмент А может работать до высоты 2300 м над рельефом на максимальной частоте сканирования в 400 000 точек в секунду (400 кГц). На больших высотах энергии лазерного импульса уже недостаточно, чтобы давать отражение от объектов, отражающих 10% излучения (т.е. с альбедо 10%). Снижая частоту сканирования, можно добиться роста мощности каждого отдельного импульса, доводя при этом высоту сканирования до 3500 м на частоте 100 кГц.
Диаграмма отчетливо показывает преимущество наличия нескольких импульсов в воздухе одновременно. Эта особенность позволяет инструменту А полностью реализовать свой потенциал высокой частоты сканирования, получая данные с большой высоты столь же быстро, как и с малой высоты. Более того, инструмент А обладает способностью получать данные, относящиеся к разным МТА-зонам в рамках одного прохода, без перенастройки инструмента (эта функция реализуется в режиме пост-обработки). Это сильно контрастирует с инструментами В и С, которые требуют тщательнейшего планирования залета, обеспечивая постоянное пребывание сканируемых объектов в пределах только одной МТА-зоны (см. рис. 9).

СРАВНЕНИЕ ПРОИЗВОДИТЕЛЬНОСТИ

Проанализируем теперь уже упомянутые параметры — плотность точек, интервал и характер распределения ТЛО — в сложных условиях горного рельефа с использованием инструментов А и С. Вводные условия — прямолинейный полет со скоростью 140 узлов (около 260 км/ч), высота полета над рельефом (из-за гористости местности) колеблется от 1000 до 2000 м. На рис. 10 показан пример внешнего вида рельефа, приведенного в данном примере.
Воздушное лазерное сканирование в горах — нетривиальная задача. Обычной практикой здесь является съемка с планированием небольшой ширины охвата и следование высотам рельефа, что позволяет вести сканирование с относительно высокой плотностью. Небольшая ширина съемки диктуется необходимостью оставаться в пределах одной МТА-зоны. Однако такой подход существенно снижает съемочную производительность (измеряется в кв. км на 1 летный час), что влечет удорожание стоимости получения данных.
Инструмент А дает нам возможность работать одновременно в разных МТА-зонах, не меняя высоту полета вслед за рельефом. Это кардинальным образом меняет производительность, позволяя очень существенно уменьшить летное время.
Однако полет на разных относительных высотах (от 1000 до 2000 м в данном примере) приводит к довольно сильному изменению плотности интервала точек в пределах полосы сканирования, при этом все три инструмента обеспечивают очень разное качество.
Для инструментов В и С эксплуатация в условиях сильно расчлененного рельефа представляет сложность, поскольку постоянная смена дистанции до объекта (то есть до земной поверхности) не позволяет сколько-нибудь эффективно выполнить фазовый сдвиг между каналами, причем этот эффект наблюдается не только по всему полю данных, но может иметь место даже в пределах одной строки сканирования.
Более того, частота сканирования инструментов В и С должна быть довольно сильно снижена для того, чтобы гарантировать попадание всех участков сканирования в пределах полосы съемки в одну и ту же МТА-зону, поскольку на высоких частотах сканирования «глубина» МТА-зоны просто меньше перепада высот на рельефе.
Рис. 11 иллюстрирует получаемые результаты для всех трех инструментов, показывая характеристики данных в надире и по краям полосы охвата. На рисунках также приведены примеры наилучшего и наихудшего из возможных вариантов распределения ТЛО на земной поверхности. Для инструмента С даже наиболее оптимальный из возможных вариантов весьма далек от идеального результата.

КАЧЕСТВО ОПИСАНИЯ ФОРМЫ ОБЪЕКТА
Для того, чтобы продемонстрировать принципиальную важность равномерного распределения ТЛО, проведем виртуальное «сканирование» искусственно созданного объекта, расположенного недалеко от края полосы сканирования, с использованием каждого из трех инструментов. Для того, чтобы читатель понял, о чем идет речь, нужно взглянуть на рис. 12.

На рис. 12 показан пример цветового кодирования высоты ТЛО, полученных при сканировании небольшого сельского дома (см. перспективные изображения). Аналогичная схема представления высоты ТЛО цветом использована и на рис. 13 (синий — ниже, красный — выше), где изображен виртуальный объект.
В соответствии с теорией, пространственная частота сканирования должна быть как минимум в два раза выше пространственной частоты (то есть самых мелких деталей) объекта. Это является необходимым условием описания формы объекта и его распознания. И хотя плотность сканирования у всех инструментов еще хоть как-то сопоставима, реальное качество описания формы объекта у разных инструментов отличается принципиально. И если ТЛО, полученные при сканировании виртуальной надписи «PHOWO» инструментом А полностью читаемы, то данные инструментов В и С совершенно не позволяют хотя бы отдаленно предположить истинную форму объекта.

ПРОИЗВОДИТЕЛЬНОСТЬ СЪЕМКИ
Для ответа на вопрос: «Как быстро тот или иной инструмент может производить лазерное сканирование с заданным качеством?», рассмотрим несколько диаграмм зависимости пространственной частоты ТЛО (величина, обратная номинальному интервалу ТЛО) и производительности съемки. Производительность съемки обычно измеряется в площади, покрываемой съемкой с требуемыми параметрами за 1 час при сканировании в 1 проход (без учета перекрытий проходов). Для инструментов В и С мы следовали обычной практике, при которой все измерения по краям полосы съемки просто отрезаются — в полном соответствии с рекомендациями производителей.
На рис. 14, слева, показана подобная диаграмма для инструмента А. К примеру, если пространственная частота сканирования составляет 4 точки на 1 м, то есть номинальный интервал оставляет около 0,25 м, то в этом случае максимальная производительность составит около 33 кв. км в час. Такая производительность может быть достигнута при разных сочетаниях высоты и скорости полета (с применением инструмента А), что позволяет подобрать оптимальное соотношение исходя из особенностей самолета и/или погодных условий. Диаграмма также хорошо показывает зависимость падения скорости сбора данных при увеличении пространственной частоты сканирования. На рис. 14 справа показана аналогичная зависимость, но уже для двух инструментов — инструмента А и В (для плоской территории). Производительность инструмента С незначительно хуже, чем у инструмента В, поэтому мы не включили его в данный рисунок.

В диапазоне производительности от 20 до 200 кв. км в час различия между инструментами А и В невелики. Тем не менее, система А с эффективной частотой сканирования 266 000 точек в секунду, превосходит по фактической производительности систему с 500 000 точек в секунду, обеспечивая 10% превосходство в части интервалов между точками или 20% превосходство в скорости (и в стоимости!) съемки. При производительности более 200 кв. км в час и работе с больших высот преимущество инструмента А быстро нарастает, поскольку он может работать не снижая частоты с таких высот, на которых инструмент В уже должен понижать скорость сканирования для того, чтобы оставаться в пределах одной МТА-зоны.
При производительности 600 км2/час превосходство инструмента А над инструментом В выше в 1,6 раза в части номинального интервала между точками и в 2 раза — в производительности (при равных номинальных интервалах между ТЛО).
Аналогичная картина наблюдается и в левой части диаграммы — при очень высоких плотностях сканирования — когда качающееся зеркало не обеспечивает нужной частоты строк сканирования. В этих условиях превосходство инструмента А над инструментом В составляет 1,8 раза.
На холмистых территориях (под которыми понимаются территории с различиями по высоте 200 и более метров в пределах одного прохода), требование оптимального фазового сдвига между разными каналами лазеров для инструментов В и С не может быть обеспечено по всей ширине полосы сканирования, и потому параметры полета должны оптимизироваться по-другому (см. раздел «Производительность сканера»). Так, в этом случае а = b/2 (вместо a = b для плоских территорий). На рис. 15 показана достижимая производительность съемки. В этом случае различия лишь возрастают. Так, инструмент А оказывается в 2,6 раза производительнее инструмента В; при равной производительности инструмент А обеспечивает в 1,6 раза меньший пространственный интервал.

В горных районах (под которыми понимаются территории с различиями по высоте 1000 и более метров в пределах одного прохода), ситуация для инструмента В, вынужденного в этом случае работать в одной МТА-зоне с пониженной частотой, выглядит наихудшим образом. Инструмент А превосходит его в 8 раз по производительности или в 2,7 раза — по пространственной частоте (интервалу между ТЛО).
ЗАКЛЮЧЕНИЕ
Вся информация, получаемая лазерным сканером о территории, ее рельефе, растительности и строениях, получается исключительно из отдельных, дискретных измерений. Пространственное разрешение при этом фундаментально ограничено дискретностью измерения дальности лазерного дальномера и диаметром лазерного луча на земной поверхности. В большинстве случаев эти ограничения не достигаются, поскольку на практике дистанция между отдельными точками лазерных отражений обычно больше диаметра лазерного луча.
Однако наиболее важно то, как в действительности распределяются эти лазерные отражения, или ТЛО, на поверхности объектов. Именно пространственное распределение ТЛО принципиально влияет на возможность получения информации о наземных объектах и их распознавания в облаках ТЛО, полученных в ходе залета.
В данной статье мы постарались продемонстрировать превосходство в производительности съемки и/или в плотности сканирования систем с вращающимся граненым зеркалом над системами с качающимся зеркалом. Данное превосходство достигается несмотря на вроде бы более низкую максимальную частоту сканирования и меньшее количество каналов лазерного излучения, давая не только больший объем в единицу времени, но и большую плотность при равномерном распределении ТЛО.
Полное содержание статьи: http://geomatica.ru/clauses/188/
