Механизм с шестью степенями свободы для систем лазерной маркировки
Научная библиотека 12.12.2016 Комментариев к записи Механизм с шестью степенями свободы для систем лазерной маркировки нетКаганов Ю.Т, Хейло С.В., Глазунов В.А. // Параллельные механизмы – новое направление в машиноведении, Сборник научных трудов по материалам II Международной научно-практической конференции, г. Белгород, 31 августа 2014 г., УДК 001, ББК 72, Т 33, с: 52-56
В статье рассматривается новое направление в области машиноведения – механизмы параллельной структуры. Развитие этого направления позволит создать принципиально новые робототехнические системы, обладающие большей маневренностью, точностью и грузоподъемностью. В то же время управление такими механизмами требует принципиально новых подходов, основанных на не традиционных методах. Таких как многоагентное управление, искусственные нейронные сети, бионические методы. С другой стороны развитие нанотехнологии предполагает создание систем на основе параллельных механизмов значительно расширяющих возможности традиционной технологической парадигмы.
Достижения всех наук современности – от физики элементарных частиц, нанотехнологий, изучения космоса до генной инженерии, и далее до психологии и философии – во все более значительной степени определяются достижениями современного машиноведения. Искусственное сердце, протез руки, хирургический микроробот, адронный коллайдер, туннельный микроскоп – все это машины, в которых имеют место двигатель, передаточный механизм, рабочий орган, система управления с использованием элементов искусственного интеллекта.
Можно утверждать, что машиноведение – является одной из наиболее важных технических наук современности. При этом наиболее интенсивно развивающейся областью машиноведения стала робототехника.
Робототехника возникла как повторение (на упрощенном уровне) частей тела человека или животного мира (рука или опорно-двигательный аппарат). В устройствах этого типа звенья кинематической цепи расположены последовательно, а каждое сочленение снабжено приводом. Такого рода механизмы воспринимают нагрузку подобно консольным конструкциям, что определяет их относительно низкую грузоподъемность. Кроме того, нужно переносить и сами двигатели, расположенные на «руке».
Альтернативой «изобретениям» природы стали роботы на основе механизмов параллельной структуры [1]. Они привлекают все большее внимание создателей новых технических систем, поскольку такие механизмы воспринимают нагрузку подобно пространственным фермам. Это свойство определяет их повышенную точность и грузоподъемность. В данных механизмах выходное звено соединено с основанием несколькими кинематическими цепями, каждая из которых либо содержит привод, либо налагает некоторое число связей на движение выходного звена. Механизмы параллельных структур могут расширять функциональные возможности технических устройств. Они могут работать в условиях агрессивных сред при удаленных из рабочей зоны приводах. Относительная грузоподъемность манипуляторов (вес механизма/грузоподъемность) с последовательной структурой составляет примерно 20/1…100/1, а для параллельных механизмов 5/1…1/1.
Интерес исследователей к этим объектам объясняется не только их функциональными возможностями, но и самой логикой развития теории механизмов. Если вначале объектом исследования были в основном плоские механизмы с замкнутой кинематической цепью и одной степенью свободы, то затем внимание стали привлекать пространственные механизмы. После этого получили развитие механизмы с незамкнутой цепью, характерные для роботов, а далее развитие вновь пришло к замкнутым цепям, имеющим большое число степеней свободы, но уже на более высоком уровне.
Наиболее известным механизмом параллельной структуры является платформа Стюарта, имеющая шесть степеней свободы и шесть кинематических цепей, соединяющих выходное звено и основание, причем в каждой соединительной кинематической цепи имеют место две сферические пары и одна поступательная, снабженная приводом. Впервые она была реализована и использована Гоффом для испытаний колесного узла автомобилей (рис.1).
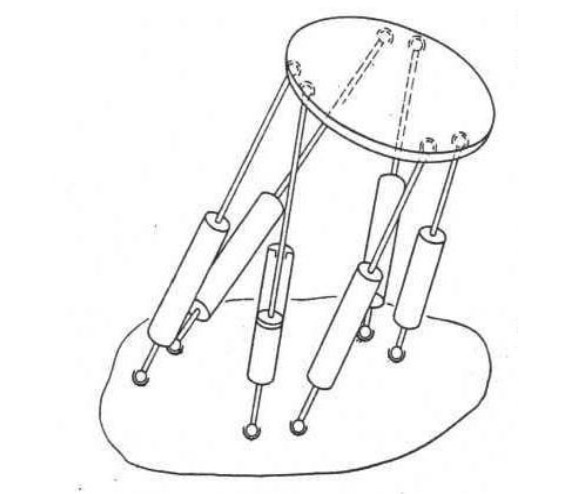
Рис. 1. Платформа Гоффа-Стюарта
Манипулятор параллельной структуры (робот) – иерархически построенная система. Нижний уровень составляют двигатели, на более высоком – компьютерная система управления, определяющая работу звеньев, на самом высоком – система искусственного интеллекта, выполняющая функции супервизорного управления.
Одним из методов исследования пространственных механизмов является винтовое исчисление. Винт – это геометрический образ, которому приводится произвольная система скользящих векторов. Винт R характеризуется вектором r и моментом, а также осью винта, для всех точек которой направления вектора и момента совпадают. Любой винт может быть определен шестью плюккеровыми координатами: три из которых – проекции вектора на координатные оси, три других – проекция момента винта относительно начала координат на те же оси. Относительный момент двух винтов можно представить как сумму попарных произведений одноименных плюккеровых координат.
Для исследования механизмов параллельной структуры метод винтов позволяет не только создавать универсальные и компактные алгоритмы анализа механизмов, но и получить качественные характеристики, связанные с особыми положениями, точностью, углами давления.
В качестве примера рассмотрим механизм параллельной структуры с шестью степенями свободы [2, 3]. В данном механизме выходное звено соединено с промежуточными звеньями сферическими парами (рис. 2). Для того, чтобы расположить все приводы на основании (включая вращательные), мы вводим, еще два элемента в каждую кинематическую цепь: это зубчатое зацепление и поступательную кинематическую пару, сопряженную с одним из зубчатых колес. Мы получили манипулятор с шестью степенями свободы, у которого при отсутствии избыточных связей, имеется три поступательных движения и три вращения.
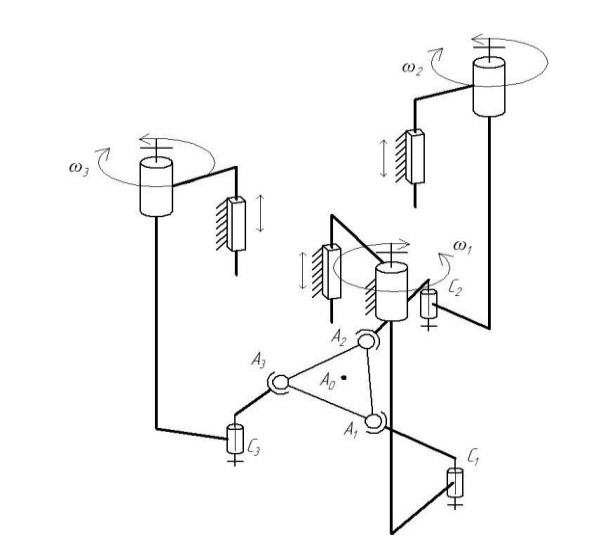
Рис. 2. Механизм с шестью степенями свободы
Механизм с шестью степенями свободы может найти применение в системах лазерной маркировки, гравировки и резки различных цилиндрических поверхностей изделий из различных материалов или для изготовления поверхностей сложной формы. Также манипуляционный механизм может использоваться в качестве опорно-поворотного устройства для наведения и вращения радиолокационных антенн.
Важной особенностью механизмов параллельной структуры являются повышенные требования к системам управления. Системы такого типа уже не укладываются в традиционные стереотипы проектирования. Более сложная механика, требующая одновременного воздействия на разные кинематические схемы этих механизмов, приводит к необходимости использования нетрадиционных управляющих систем. Такие системы базируются на применении методов искусственного интеллекта и бионических методов [3]. Как правило, параллельные механизмы обладают значительно большим числом степеней подвижности, чем механизмы традиционной структуры. В настоящее время для управления подобными механизмами разрабатываются системы управления на основе многоагентного подхода, теории искусственных нейронных сетей, теории нечетких вычислений, биоинспирированные методы. Таким образом формируется
принципиально новая парадигма создания технических систем. Исследование биологических принципов организации живых систем позволяет выйти на новый уровень создания технических систем.
Другим направлением использования принципов параллельных механизмов является создание микро- и нанороботов. Уже в настоящее время ведутся разработки подобных механизмов для применения в медицине и в военной области. Дальнейшее развитие вычислительной техники, связанное с созданием квантовых компьютеров в сочетании с разработкой параллельных механизмов нанотехнологического уровня приведет к новой технологической революции.
Таким образом, создание теории и практики применения механизмов параллельной структуры может привести к новому направлению развития современной техники и технологии.
Полное содержание статьи: http://issledo.ru/wp-content/uploads/2014/09/Sbornik-2_1.pdf

Leave a comment
You must be logged in to post a comment.