Лидар разглядел метровые детали за 45 километров
Лазерное сканирование 07.08.2020 Комментарии к записи Лидар разглядел метровые детали за 45 километров отключены
Изображение здания на расстоянии 45 километров в видимом свете, которое снято на камеру (слева), в сравнении с результатами работы лидара при различных алгоритмах обработки (справа снизу — предложенный авторами алгоритм)
Zheng-Ping Li et al. / Photonic Research, 2020
Физики продемонстрировали работу лидара, который способен строить трехмерные детальные (с разрешением до нескольких дециметров) изображения объектов на расстоянии в 45 километров и работать при этом в условиях высокого шума и слабого (порядка одного фотона на пиксель) сигнала. По словам авторов, в дальнейшем предложенная технология может позволить получать детальные изображения по однофотонному сигналу на дистанциях до нескольких сотен километров — то есть на сверхдальних расстояниях для лидаров. Статья опубликована в журнале Photonic Research.
Лидар — это прибор, который позволяет получать информацию об удаленных объектах при помощи оптического излучения. Основными элементами такого устройства являются излучатель и приемник. Свет от излучателя отражается, встретившись с препятствием, и (в несколько искаженном виде, поскольку на пути происходит рассеяние) возвращается к приемнику — по временному интервалу между формированием и регистрацией луча можно вычислить расстояние до объекта, от которого свет отразился. Посылая лучи сразу во множество направлений, можно таким образом воссоздавать трехмерные изображения непрозрачных предметов.
На достаточно далеких дистанциях (порядка километров) лидары сталкиваются с проблемой: сигнальное излучение дважды (на прямом и обратном пути) рассеивается в протяженной среде, разделяющей объект и прибор, а приемник при этом регистрирует лишний свет, который не несет полезной информации. Возникает ситуация, когда на один пиксель формируемого изображения приходятся считанные единицы отраженных фотонов и во много раз больше фоновых — в таких условиях трудно выделять сигнал среди шума. Несмотря на то, что существуют алгоритмы фильтрации и обработки данных, совмещать достаточно качественные однофотонные изображения и дальнодействие в лидарах по-прежнему сложно.
Ученые из Научно-технического университета Китая под руководством Чжэн Пин Ли (Zheng-Ping Li ) и Синь Хуан (Xin Huang) изготовили дальнодействующий лидар и протестировали однофотонную регистрацию на расстояниях в десятки километров. В качестве излучателя физики использовали инфракрасный лазер (длина волны 1550 нанометров) — это позволило совместить безопасность прибора для зрения с хорошей прозрачностью атмосферы (доля излучения, которую пропускает воздух, для данной длины волны сравнима с такой же долей для видимого диапазона) и при этом уменьшить влияние солнечного света (его интенсивность у земной поверхности в инфракрасном диапазоне в 2–3 раза ниже, чем в видимом).

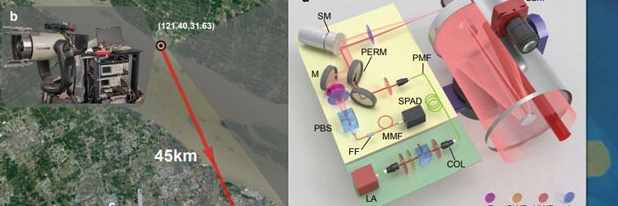
Схема внутреннего устройства лидара, его изображение и карта взаимного расположения прибора и целевого объекта (здания)
Приемник лидара авторы оснастили оптической системой, которая фильтровала фотоны по длине волны (посылая в детектор частицы из полосы спектра шириной в 1,3 нанометра) и поляризации (поскольку первоначальный пучок света был поляризован) — таким образом установка отсеивала фоновые частицы и повышала качество сигнала. Отфильтрованное излучение регистрировал детектор, способный замечать отдельные фотоны.
Обработку накопленных лидаром данных ученые вели в два этапа. Сначала алгоритм суммировал события (регистрации фотонов) по всем пикселям будущего изображения и определял промежуток времени, в котором эта сумма испытывала пиковое значение — то есть обнаруживала интервал регистрации полезного сигнала. После этого авторы подбирали параметры полезного сигнала (зависящие в конечном счете от глубины изображения и интенсивности отраженного излучения), которые наиболее правдоподобно описывали бы данные детектора за указанный период. Наконец, на основе этих параметров авторы строили трехмерную картину, глубина в которой определялась усредненным (в отдельности для каждого пикселя) временем регистрации сигнальных фотонов.
Для оценки качества результатов физики также использовали три дополнительных алгоритма обработки данных из предыдущих исследований и получали аналогичное изображение в видимом диапазоне при помощи камеры.

Сравнение реального облика здания, его изображения в видимом свете и четырех результатов обработки данных лидара (справа снизу — предложенный алгоритм).
Расстояние до здания — около 21 километра. Рядом с изображениями с лидаров указано пиковое отношение сигнала к шуму (в децибелах), которого удалось достичь
В результате ученым удалось получить изображение объектов на расстоянии до 45 километров с предельным разрешением в 0,6 метра при среднем количестве фотонов на пиксель около 2,59 и тридцатикратном преобладании шума над сигналом. Кроме того, предложенный в работе алгоритм позволил достичь максимального соотношения между сигналом и шумом в обработанном изображении на 8–14 децибелов выше, чем это получилось в рамках других подходов.
Авторы полагают, что такие особенности оборудования и способа обработки данных позволят в будущем существенно развить технические возможности лидаров и обеспечить их работу на дальних дистанциях (вплоть до сотен километров) и в условиях низкой освещенности. Ранее мы писали о том, как лидар научили видеть сквозь туман и объединили в одном устройстве с радаром.
Николай Мартыненко
Источнимк: https://nplus1.ru/news/2020/08/04/single-photon-3d-imaging